
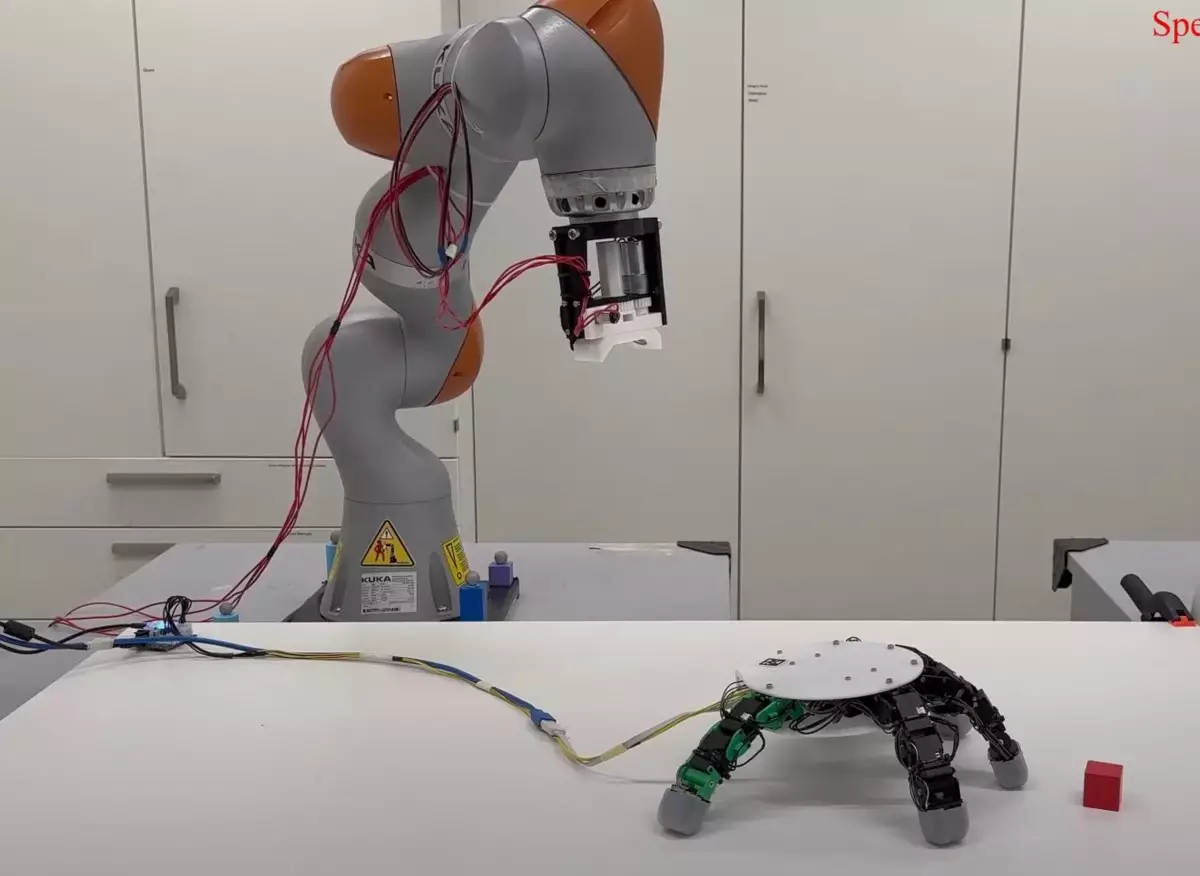
In the realm of robotics, research videos typically follow a predictable and often monotonous trajectory. However, some extraordinary presentations demand attention, captivating audiences with their unique approaches. One such standout is “Beyond Manual Dexterity,” unveiled at the IEEE International Conference on Robotics and Automation recently held in Rotterdam. This remarkable video showcases a highly agile robotic gripper, grabbing viewers’ interests from the outset. Yet, as the narrative unfolds, it introduces a series of transformative concepts that challenge the boundaries of traditional robotic design.
The underlying research from Switzerland’s École Polytechnique Fédérale de Lausanne (EPFL) aims to extend the capabilities of robotic hands. While deep learning has propelled advancements in automated dexterous manipulation, especially in multi-fingered grasping, many unexplored avenues remain. For instance, the topic of contact information-guided grasping in cluttered settings has not received adequate attention. Here, traditional robotic design, often inspired by nature, comes into question—prompting a critical reevaluation of how robotic hands could evolve beyond their biological templates.
Historically, robotics and biomimicry have gone hand in hand, where natural creatures serve as templates for design. While this approach has cultivated major advancements in robotic applications, it can also limit creativity and innovation. The notion of redesigning robotic hands to transcend their biological counterparts raises a provocative question: What if the limitations imposed by nature were disregarded? The EPFL-directed study exploits this idea, suggesting that by letting go of traditional inspirations, designers can explore novel functionalities. This guidance allows robotic systems to manipulate objects in ways previously deemed impossible.
Alongside the innovative aspects of their designs, the team at EPFL confronts potential discomfort regarding the appearance of these new robotic hands. As they integrate features that enable unconventional movement—such as backward bending or autonomous crawling—their creations may evoke unsettling feelings akin to those sparked by horror films. Renowned for eliciting visceral reactions, these designs provoke questions about societal acceptance of robots that resemble humans yet function outside the norms of human-like behavior.
Critically, while the EPFL team’s research offers thrilling prospects for increased dexterity in robotic grasping, the practical application of these innovations on a larger scale remains uncertain. Their work emboldens a fresh perspective in the field of robotics, inviting further discussions among researchers and developers. As noted by researcher Xiao Gao, their endeavor of venturing into unsettling territory might just revolutionize robotic design: “Although you see it in scary movies, we might be the first to introduce this idea to robotics.” As society stands at the crossroads of innovation and discomfort, a new era of robotic dexterity begins—an era defined by a departure from mere imitation of nature and an embrace of the extraordinary.